
Triangulation Success – Enigma’s R&D Demonstrates Exciting Potential for Scientifically Measuring UAP Flight Paths
Enigma hosts the world’s largest collection of UAP data, and every month we receive thousands of UAP media captured on people’s phones. What can we learn about the UAP from recorded images or videos? If we analyze these videos, is it possible to know how far away the UAP is, how fast it’s moving, or trace out the trajectory of the UAP? Because if we are able to measure the kinematic properties of an unidentified aerial object, we can gain all kinds of insights about how advanced they are in physics and technology. For instance, we might begin to understand the propulsion mechanism. Is the object maneuvering in surprising ways? And of course the ultimate question: what is it?
Enigma is thrilled to share more about what we’ve been doing on the R&D front the past few months: building a proprietary technology that uses the principle of triangulation to address that very question.
Imagine this: when two or more people use their phones to record the same object, and we know when and where the video is taken, as well as the direction that each phone is pointing at the time of the recording, we can apply a mathematical algorithm to reconstruct the position of the object at every moment in time during the recording. String those data points together and you get the full object trajectory! In this way, we can obtain actual object measurements using just civilian-reported sightings, transforming them from anecdotal first-person accounts to objective, sensor-based object measurements. Our early tests were successful and we are excited to develop and deliver this capability to our users. Let’s dive in to see how it works.
The Principle of Triangulation
Triangulation, in its broadest sense, is a method used to determine the location of a point by forming triangles to it from known points. It’s extensively used in processes such as surveying, navigation, and computer vision. Here’s a summary diagram of how it works:
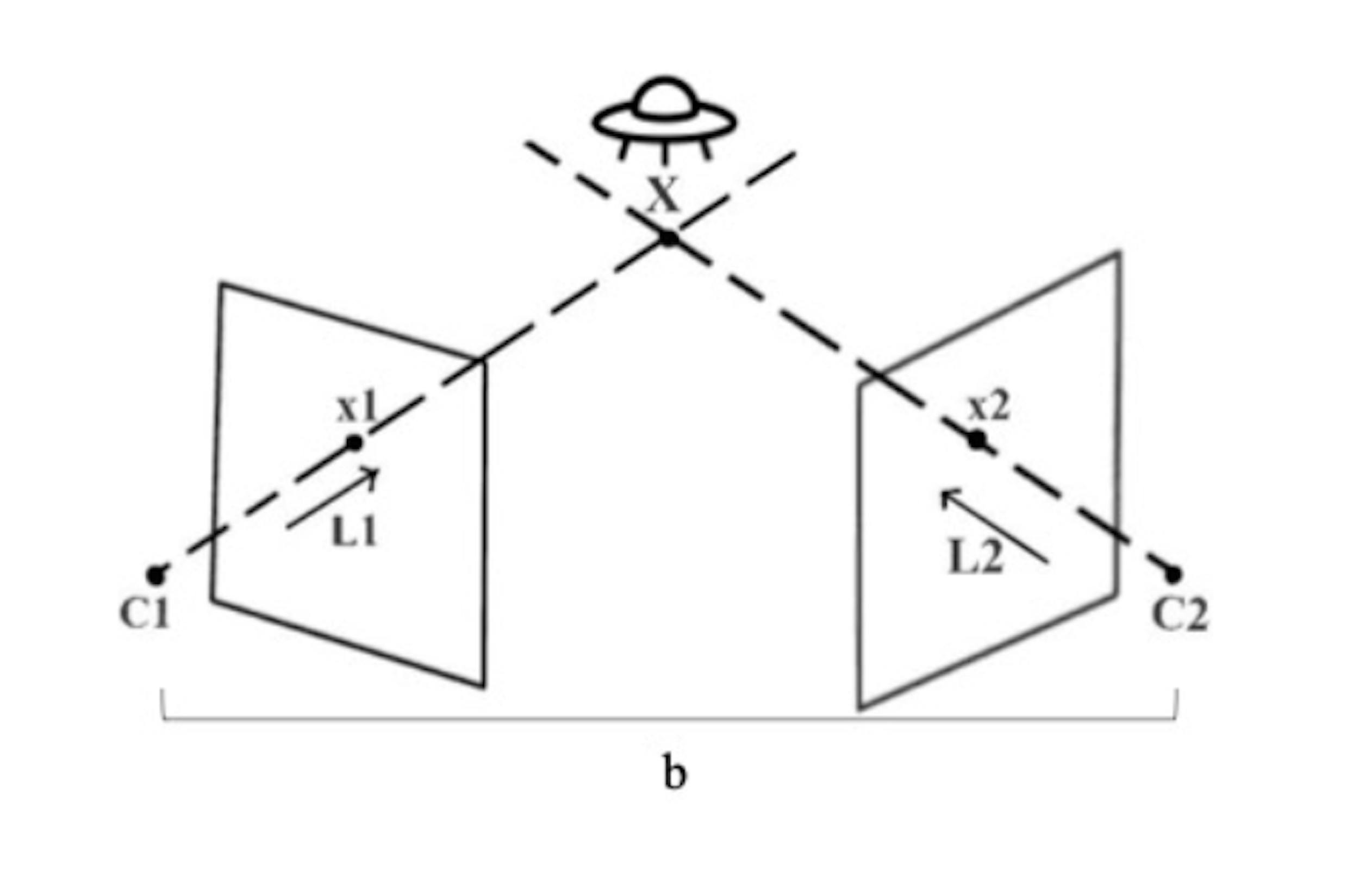
In this drawing, we can find the position of a distant object X with the angles observed from points C1 and C2 and the baseline “b” between them, along the line-of-sights L1 & L2. The points C1, C2, and X form a triangle, hence “triangulation”. In the case of Enigma, X may be the UAP, and C1 & C2 are smartphones with the UAP showing up at positions x1 and x2 on the respective screens.
Telemetry Data
The above drawing also tells us that, in order for this calculation to work, we need to know the positions of C1 and C2, as well as the view angles from C1/C2 to X. In the case of iPhones (we’re hard at work on an Android version!), this means the GPS location and the orientation of the phone are needed from each observer. Therefore, in order to capture videos that we can triangulate from, we ask the users to use a special “Enigma camera” (built natively into the Enigma iOS app, free to download on the App Store), and share their location with us. Specifically, the telemetry data transmitted back to our triangulation service are:
1. GPS location (longitude & latitude)
2. Device altitude: We choose to measure altitude from a mathematical model of a slightly deformed sphere approximating the surface shape of the Earth
3. Device orientation: This is measured as the amount of rotation around each of the device’s axes. It can be expressed in standard yaw/pitch/roll (Euler) angles, or any mathematically -equivalent representations, such as the quaternion. According to Apple, the angles are measured in the following way:
Equipped with these data points, and assuming the users center the object in their screens, we are ready to triangulate!
Algorithm
Once at least two observers of the same aerial object have used the Enigma native camera to record the object inflight, and sent their recordings to Enigma, the telemetry data will be sent to us. Then we automatically align the videos, and for each concurrent frame we run the triangulation algorithm. This algorithm takes the above telemetry data points as input, and performs a series of coordinate system transformations and algebraic calculations to form triangles and find the interaction of the line-of-sights to determine the object position. Enigma holds a patent over this triangulation with smartphone technology.
Testing in the Field
Time for tests! For our early tests, the Enigma team chose tourism helicopters as an initial target aerial object. Below is the triangulated track of a helicopter landing on the dock. The red dots are the calculated position of the helicopter from two iPhones, and the blue dots are the results of us intentionally varying the input values to the triangulation algorithm so we can study the error spread. The red path is entirely enveloped by the blue dots, meaning that the results are consistent with our error estimates and there were in fact no “surprise” errors.
For our second series of R&D tests, we decided on a drone as an aerial target. We then took the test a step further and decided to attempt reconstructing the full flight path of a drone using triangulation. In the following video, you’ll see one white drone following a green drone. The green path is the actual flight record downloaded from the drone flying over Prospect Park in Brooklyn. The white path shows our reconstructed flight of the drone through two pairs of observers pointing their Enigma cameras at the drone as it flew around the park. It can be seen that the reconstruction tracks the real path closely, and by combining the paths from the two pairs of observers, the actual (green) and triangulated (white) path were accurate to within 5 meters - an astonishing success! This demonstrates that our handling of the telemetry data and the triangulation algorithm worked as designed, and within the parameters tested can provide unique tracking of aerial objects with high precision.

Green lines: actual drone path. Transparent white lines: triangulated data from the individual smartphones. Solid white line: triangulated flight path from the combined smartphone data.
Conclusion:
Enigma's innovative use of triangulation technology is poised to revolutionize our communal understanding of UAP. By using triangulation, we can take an average person’s recordings of an aerial object and transform it into measurable, scientific and valuable observation. By leveraging telemetry from mobile devices, our algorithm accurately reconstructs the trajectory of aerial objects observed from multiple angles. Our successful tests have showcased the precision and reliability of this technology. We are thrilled by the potential for what this means for the UAP observing community and how it might contribute to the meaningful study of UAP science, and it means that no matter who you are, whether you're a scientist or simply a UAP curious or enthusiast, your observation can really matter.
In the spirit of scientific progress, we invite your feedback and questions. If you're ready to experience the cutting edge of UAP tracking technology, we encourage you to download the Enigma iOS app (or sign up for the Android waitlist) today. Try out the native Enigma camera, participate in real-time data collection, submit a UAP sighting of your own, and join us in unlocking the exciting mysteries of the aerial unknown.