
Finding Signal in a Noisy World
By Isaac, Senior Data Scientist at Enigma Labs. Isaac is a physics PhD and previously worked in particle astrophysics.
“We face danger whenever information growth outpaces our understanding of how to process it.” — Nate Silver
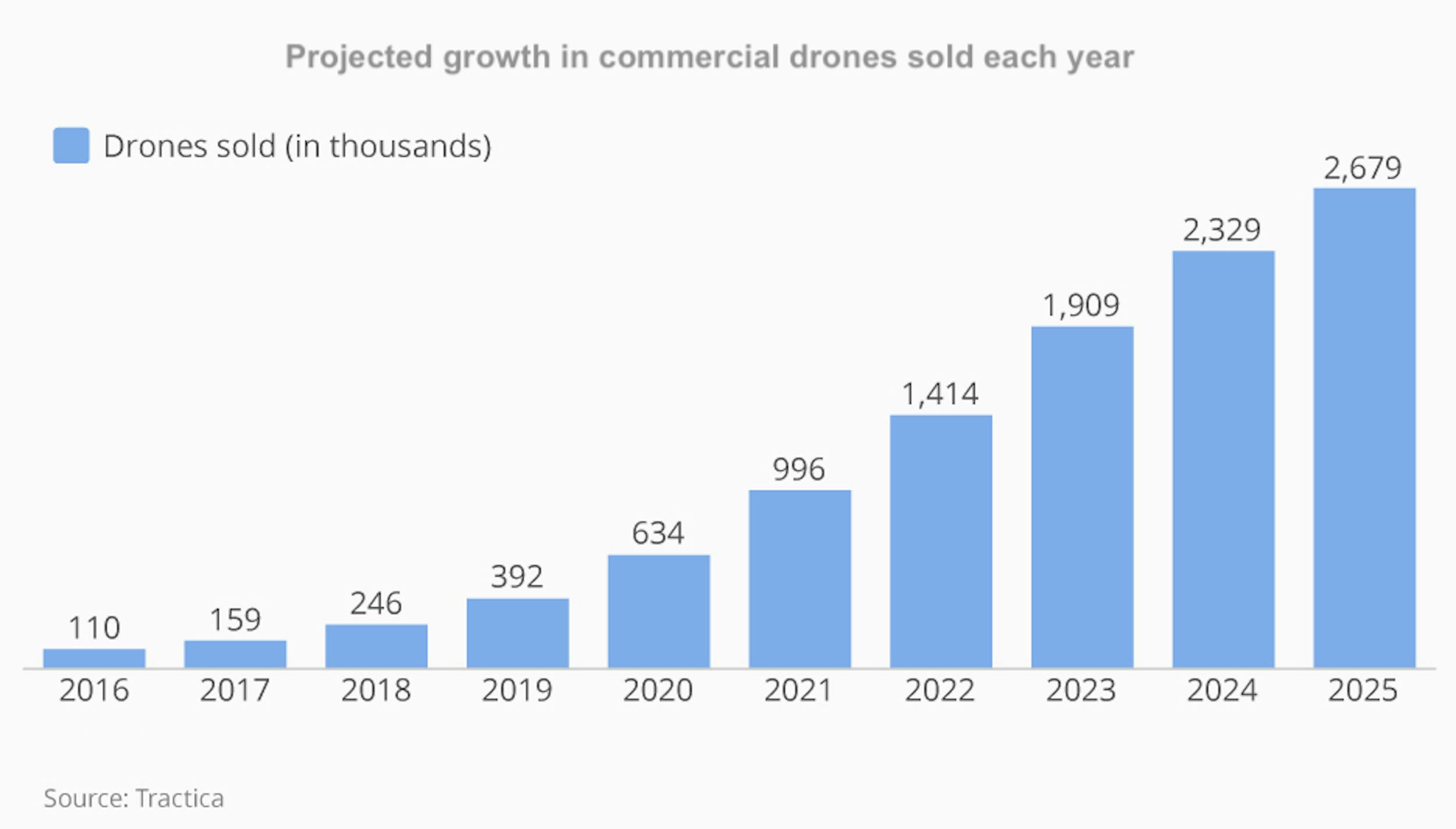
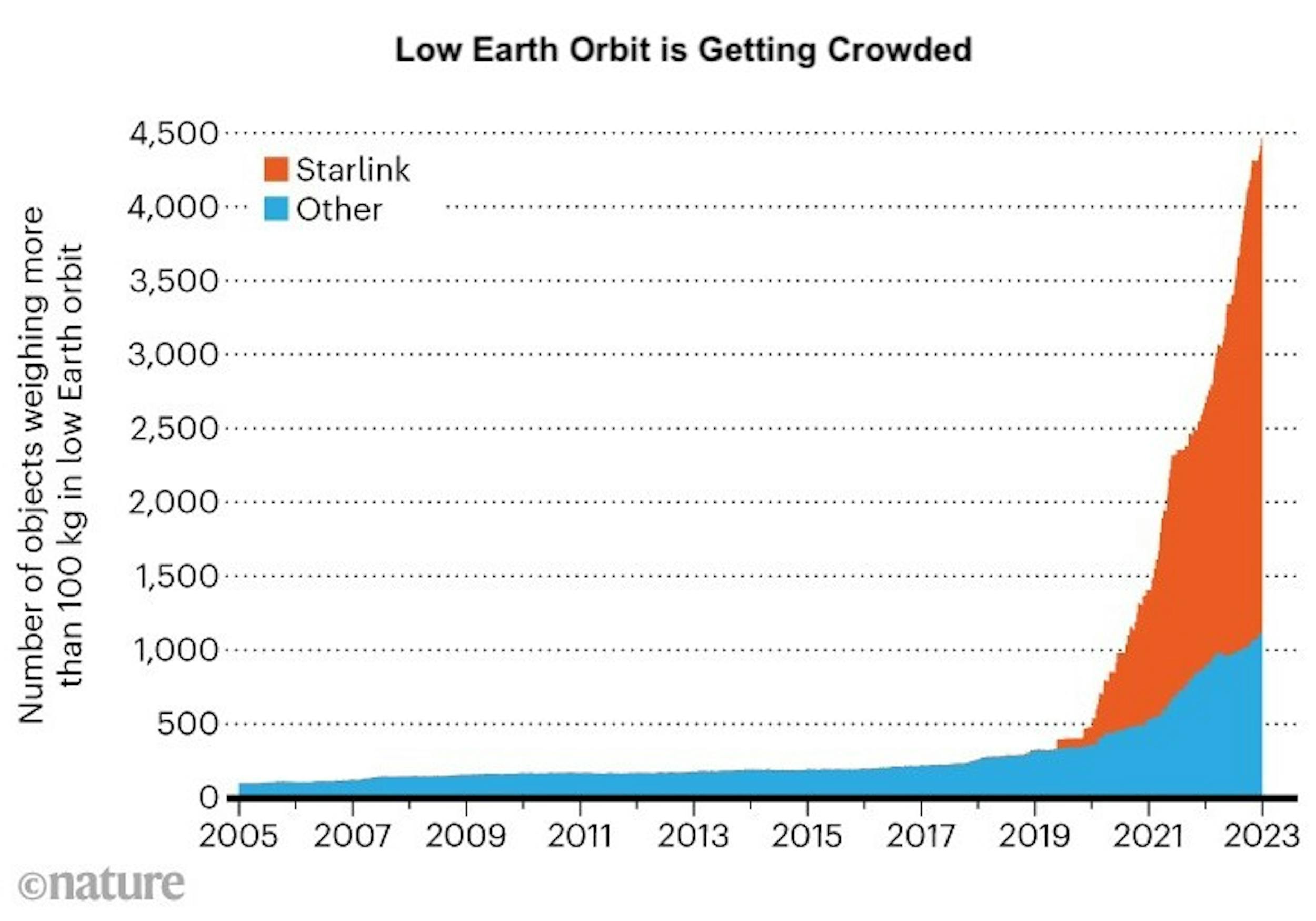
Over the last fifteen years, the amount of information in our skies has grown rapidly. Commercial drone sales have ramped to the millions per year, and the number of objects in low earth orbit has exploded with the advent of Starlink and low cost launch vehicles.
At Enigma Labs, one of our goals is to surface truly anomalous unidentified object sightings to the general public. But our skies are crowded with identifiable objects such as airplanes, balloons, and drones. This poses a signal-to-noise challenge. Historically, the majority of what people submitted as possible UAP had prosaic explanations, making it harder to find and study true unknowns.
To tackle this challenge, we not only need to make the sighting submission process as frictionless as possible, but also implement mechanisms to identify and veto known objects. The ever-expanding list of objects that one may mistake for a UAP is what we call “confounding variables” or noise. In this post we will share how our team approaches eliminating confounding variables. Before we do so, we’ll get into why removing background noise is key to scientific research.
Removing Background Noise is Critical in Science
On a personal level, most of us can relate to the utility of background noise removal. When you turn on noise canceling in your headphones, you hear the difference immediately. Miniature microphones listen to outside noise frequencies and emit the exact opposite signal to effectively cancel out both sets of sounds when soundwaves collide. [1]
Beyond your headphone experience, noise removal is also critical to pushing forward science. At the Large Hadron Collider, particle physicists sift through a vast ocean of noisy background events in their detectors to find the tiny signal that points to new physics, like the Higgs Boson. A tremendous amount of time is invested in understanding and modeling background noise events so that they can be subtracted from measurements to reveal the hidden signal with high confidence.
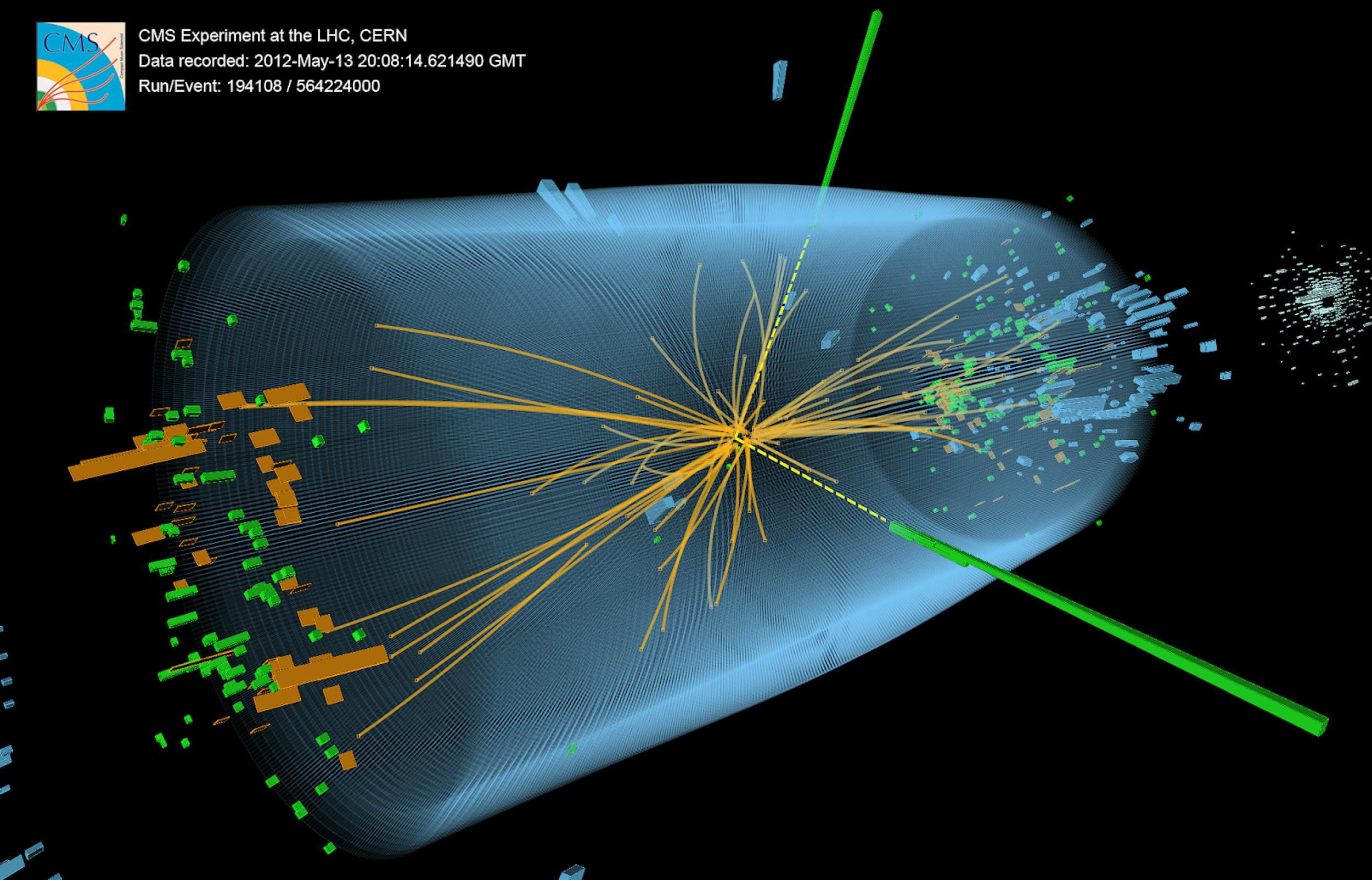
Higgs boson detection at the CMS experiment of the LHC. The event shows the decay of the Higgs boson into a pair of photons (green).
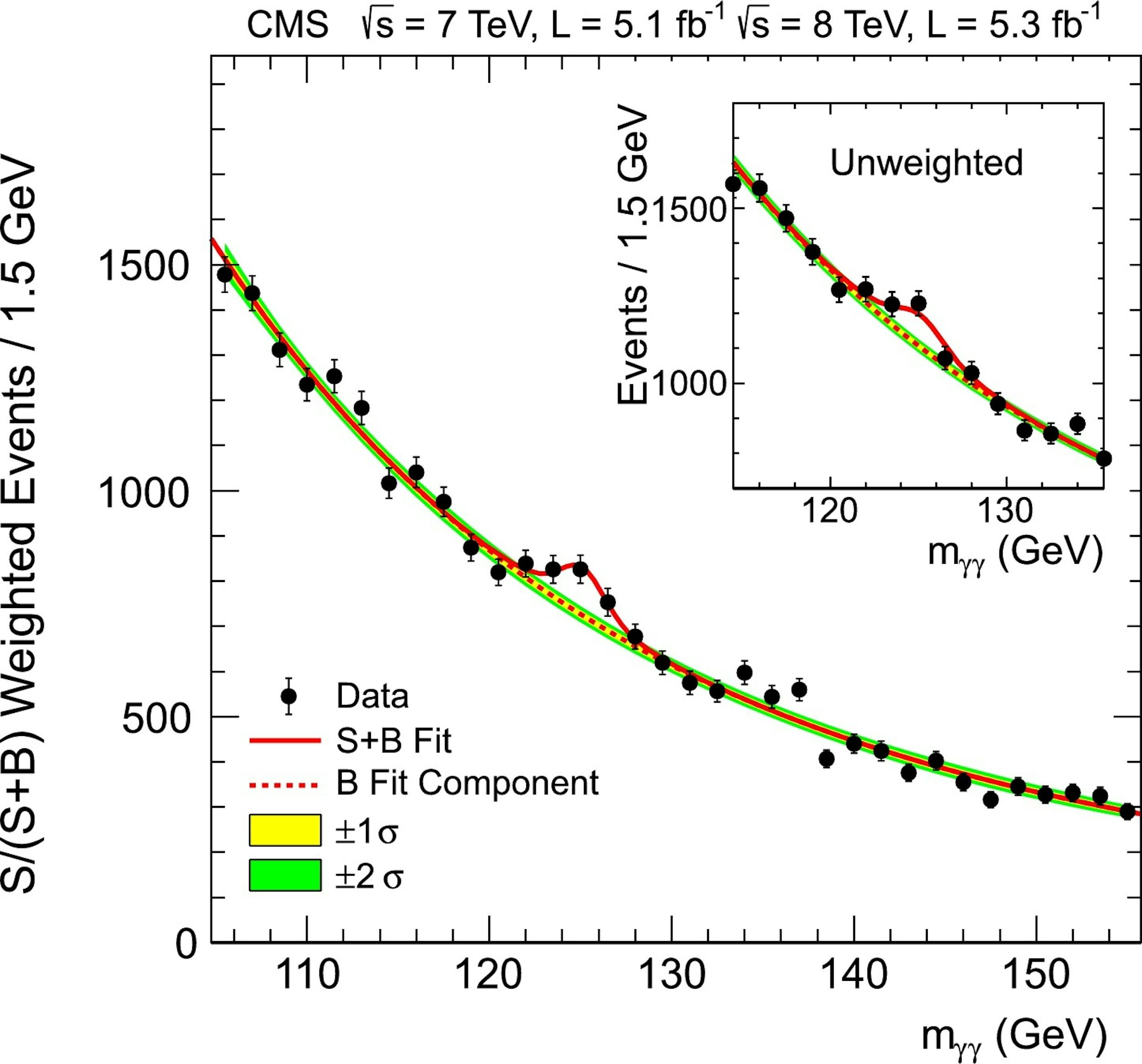
Signal and background measurements of the H→γγ decay channel in CMS. The small excess (data points) over the background (dashed red line) represents the signal [1].
Scientists in the IceCube neutrino observatory at the South Pole face a similar challenge in searching for astrophysical neutrinos. I conducted research in the field of neutrino astronomy and worked closely with them. One issue they faced was that muons and neutrinos from cosmic-ray induced airshowers create an atmospheric background that can be several orders of magnitude larger than the astrophysical neutrinos that we were trying to detect.

The IceCube Neutrino Observatory
Special models have been developed to remove those particles and obtain a purer sample before statistical analyses on the astrophysical neutrinos can be carried out.
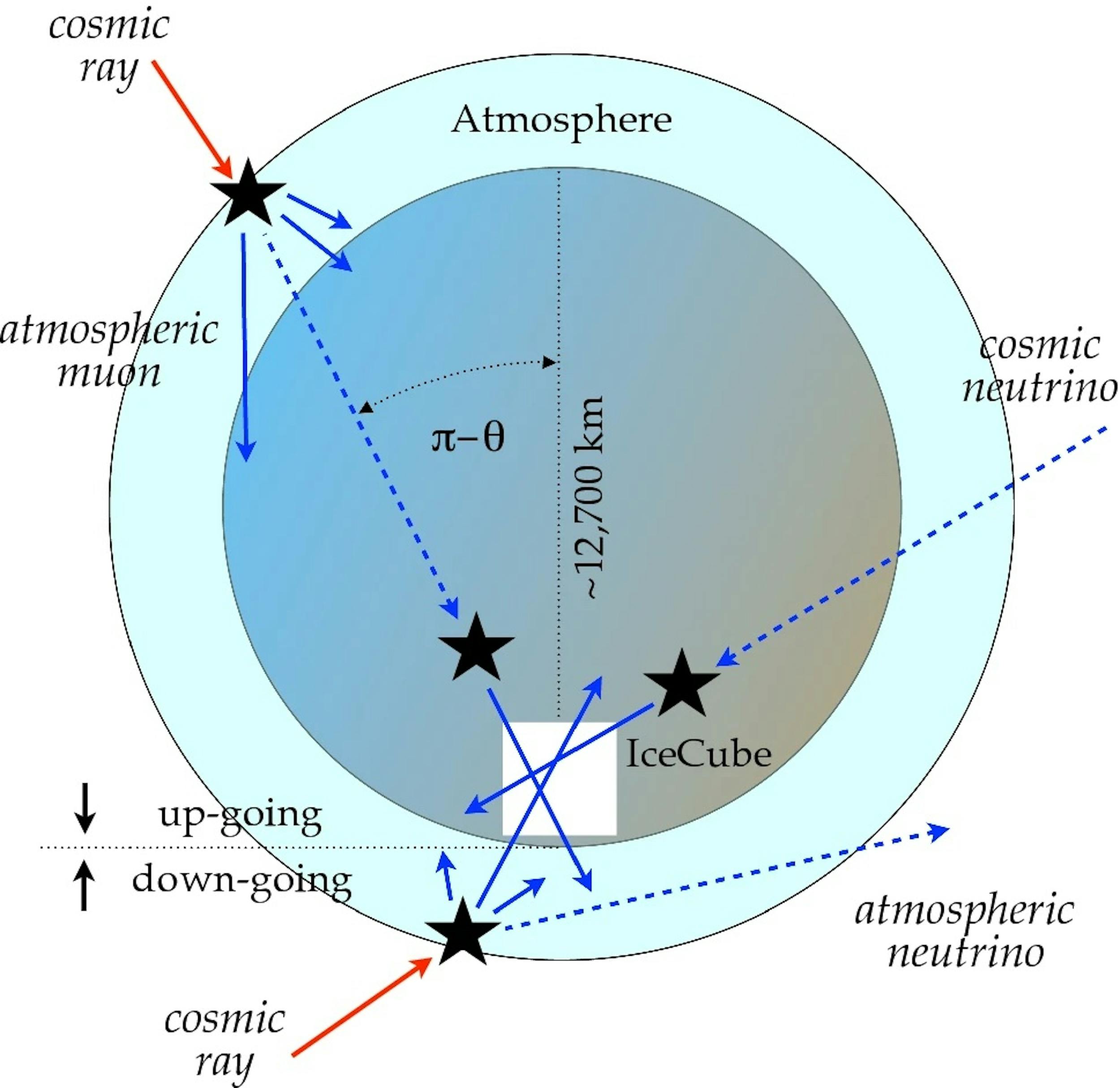
Illustration of cosmic-ray-induced atmospheric backgrounds versus cosmic/astrophysical neutrinos scientists are searching for in the IceCube neutrino telescope at the South Pole [2].
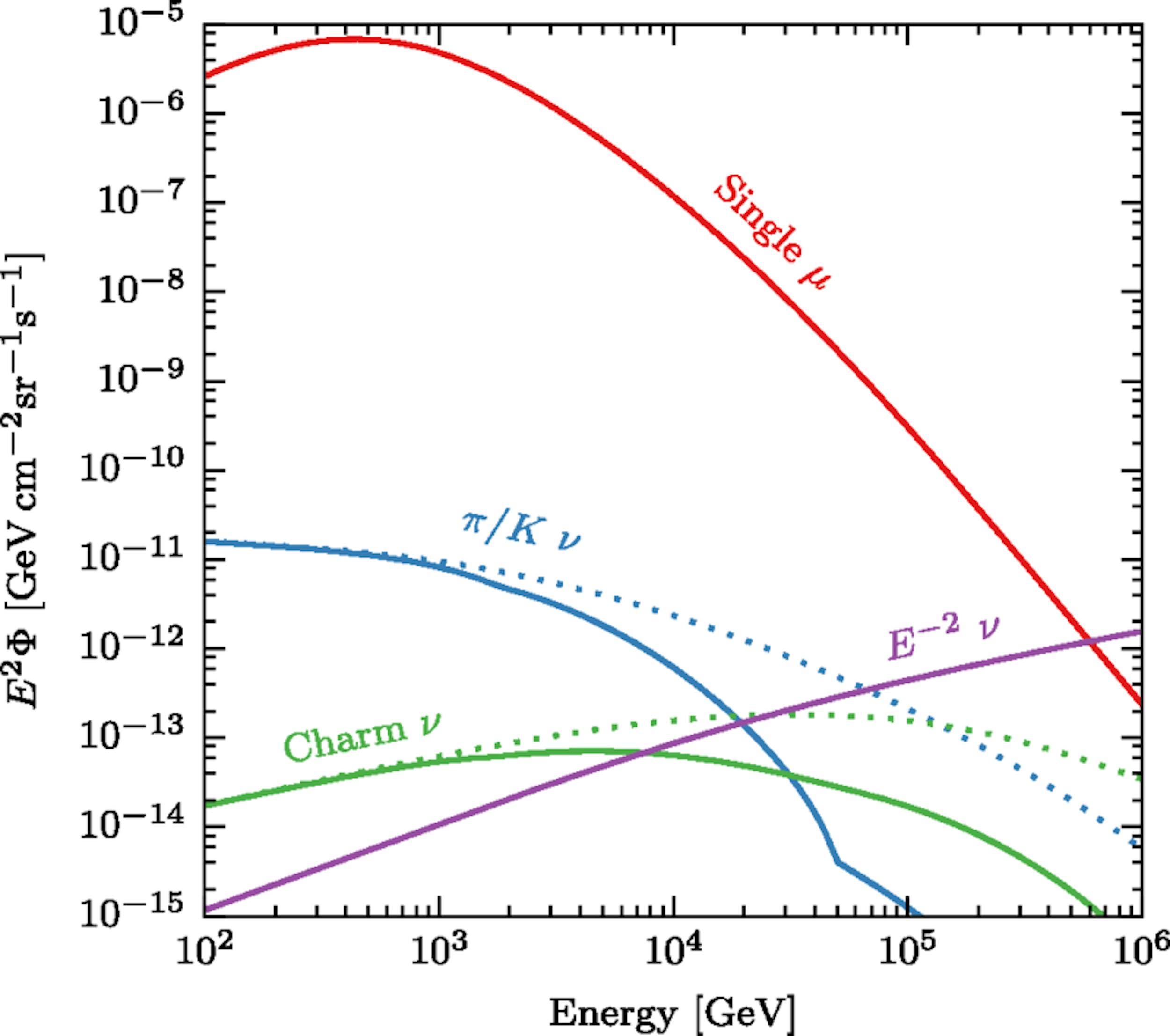
Flux levels of background atmospheric muons (red), atmospheric neutrinos (blue & green) versus signal (purple) in IceCube [3].
Despite scientists’ best efforts, it is difficult to remove background entirely. Fortunately, it is possible to reduce it to a level where one can start to identify signals and draw observations with confidence.
Confounding Variables in UAP detection
Enigma Labs seeks to approach the UAP problem with equal scientific rigor. We are developing methods to identify objects and phenomena in the sky in real-time, helping our users understand if they are looking at a known object before they submit a sighting.
The vast majority of submitted UAP sightings are known visible objects - satellites (including Starlink), aircraft (commercial or military), military equipment, stars and planets, meteors, asteroids, space debris, clouds, lightning or other ionospheric phenomenon, drones, balloons and blimps, birds, insects, man-made lights, man-made lights on the ground that reflect off the cloud, and sometimes, the moon 🌝. Today, several confounding variable data layers are already integrated into our platform. We will continue to roll out additional data sources in upcoming releases. As more confounding variables are added, we will keep refining the user experience, the scoring, and the means by which these data and metadata can be accessed and shared via our platform. Here are some of the confounding variables we currently process and intend to process:
1. Satellites
Currently we use satellite tracking from CelesTrak, a non-profit organization making unclassified orbital data publicly available. Depending on the type and purpose of the satellite, the tracking information is updated from several times daily to once every week or two weeks.
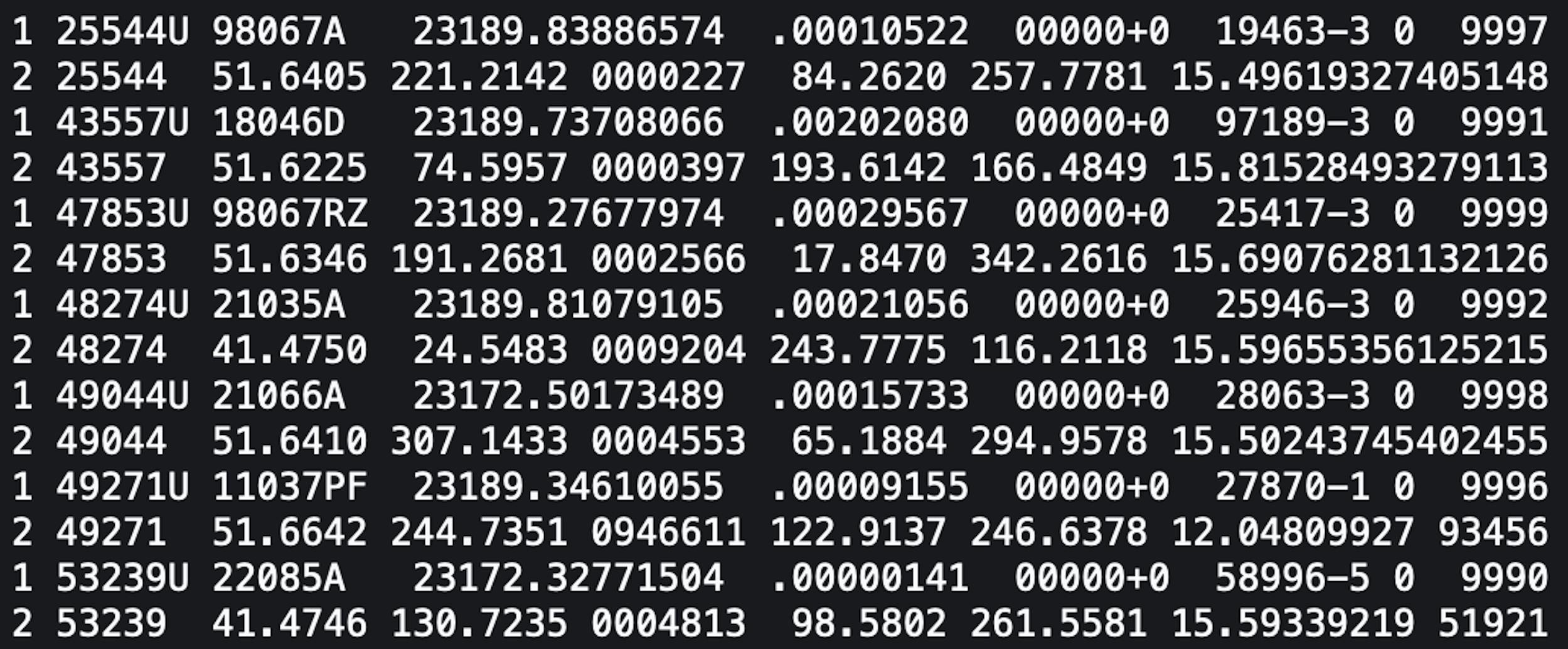
2LE (two-line element) data for space stations provided by CelesTrak. 25544 is the catalog number for the International Space Station
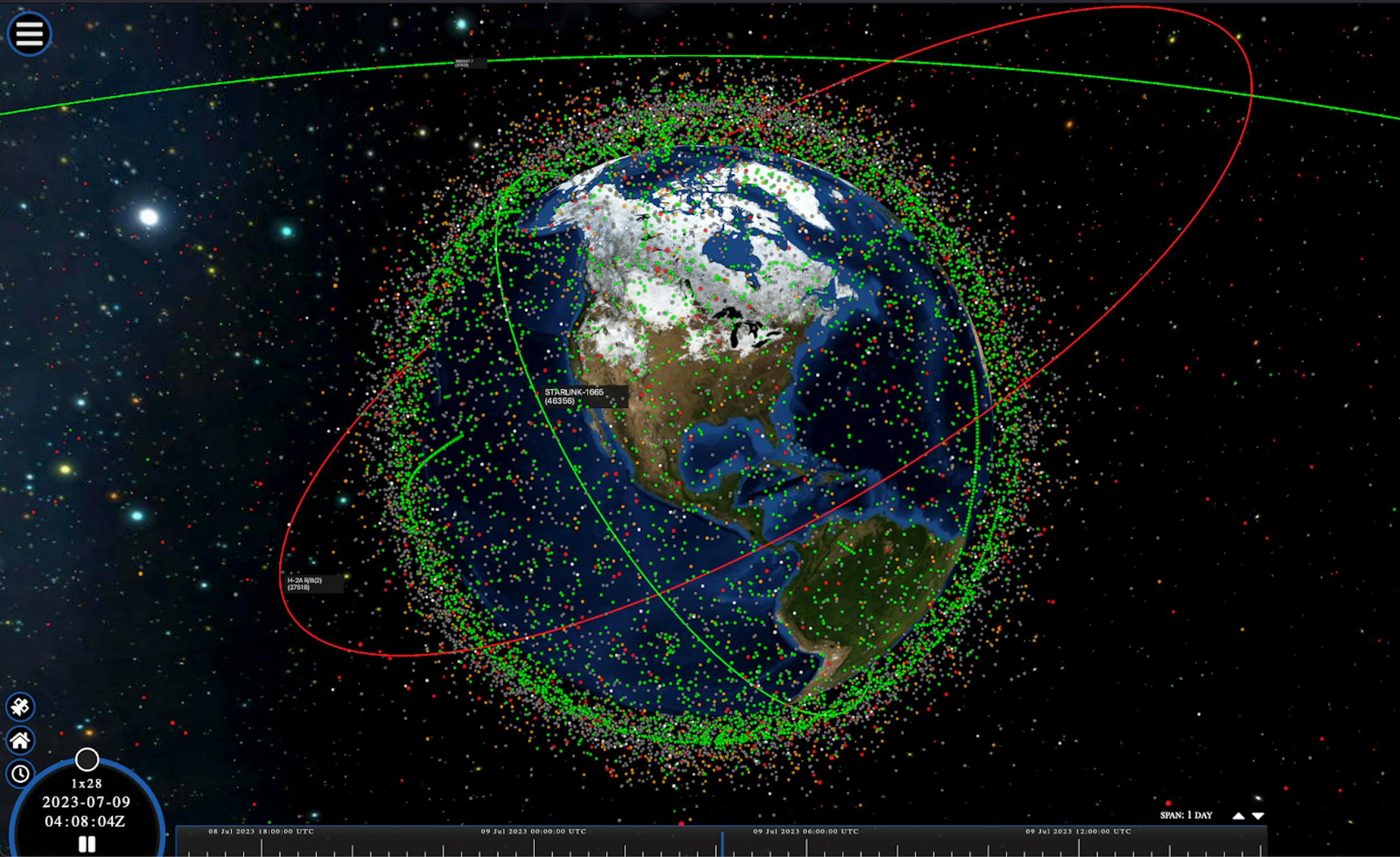
Satellite orbits by spaceware.io
2. Aircraft
Commercially available ADS-B transponder data locates, tracks, and updates positions of manned aircrafts like airplanes, and unmanned aircraft including large UAVs and large atmospheric balloons. The satellite derived data updates up to 2 Hz, with an average of 0.5 Hz per aircraft.The accuracy is +- 5m in the horizontal, and ~25 ft in the vertical.
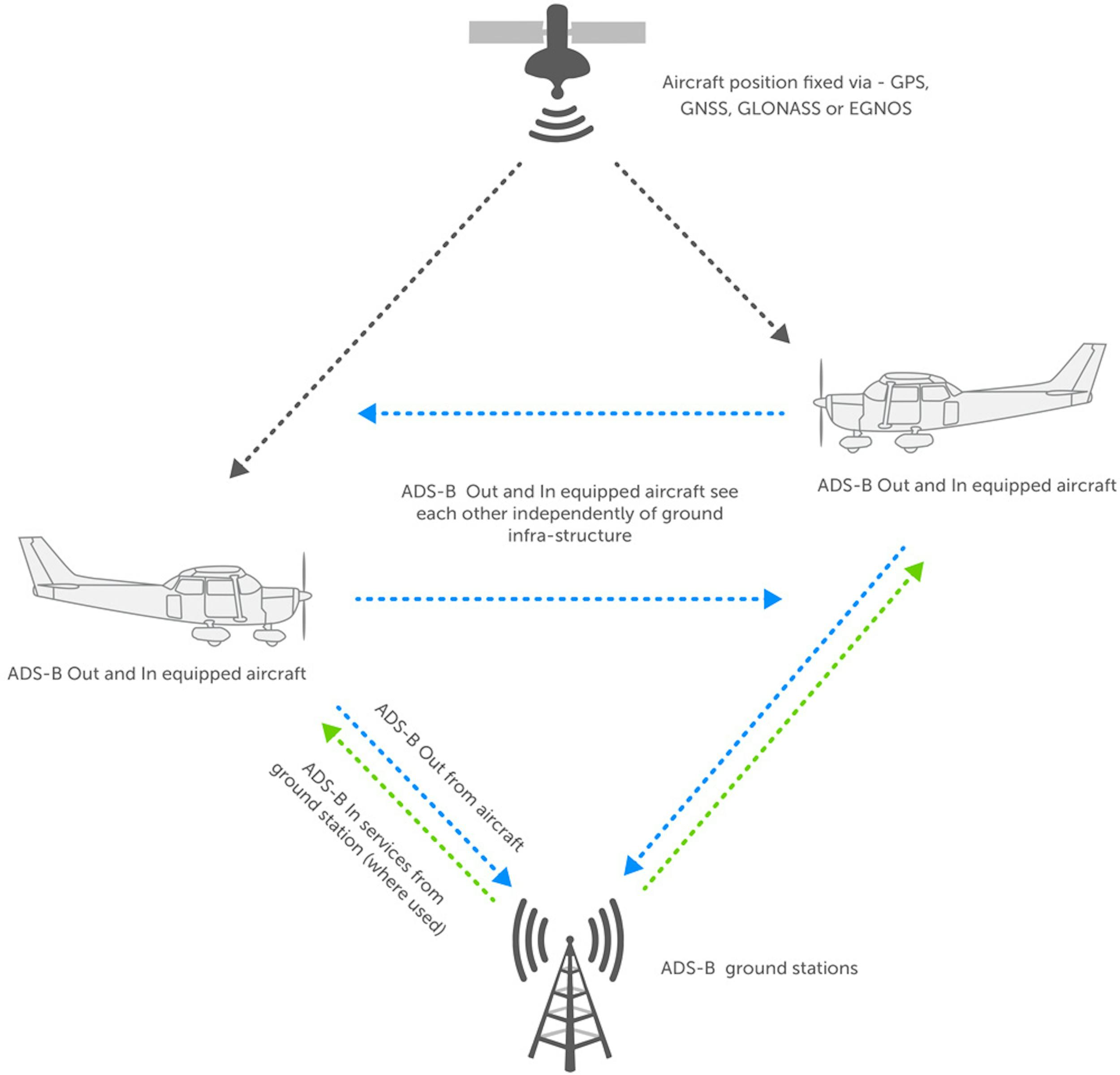
ADS-B explained. Source: https://www.trig-avionics.com/knowledge-bank/ads-b/ads-b-explanations/
3. Rocket launches and boosters
These objects are often confused with UAP due to their luminosity and unusual flight patterns. SpaceX provides launch and booster data https://github.com/shahar603/Launch-Dashboard-API#Apps. Time and location of other rocket launches are available via public sources such as https://planet4589.org/space/gcat/data/derived/launchlog.html.
4. Ionospheric phenomenon
NOAA Next Generation Radar (NEXRAD) provides a state-of-the-art, continuously streaming feed of Doppler weather radar data that detects and tracks various weather events such as snow, rain, hail, and unusual lightning etc. It also has the capability to detect large flocks of birds and swarms of insects. The dataset covers the continental U.S. and most of the northern Pacific region, and updates every 4.5-10 minutes, the time it takes for an antenna to finish a 360-degree scan. Although weather and natural phenomena are not as often confused with UAP by the naked eye, they can look unusual and confusing on radar.
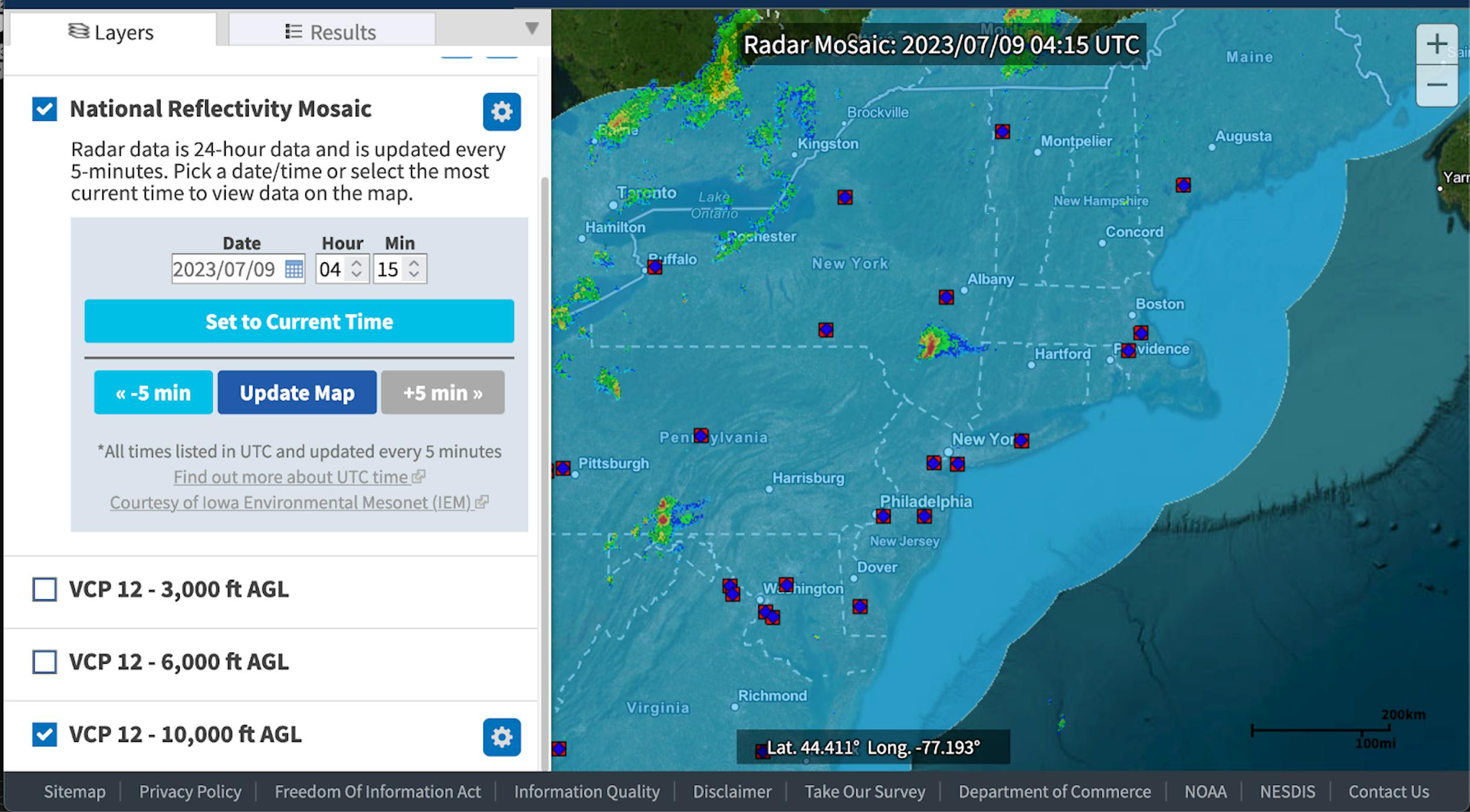
Weather radar data from NEXRAD on the Northeastern coast.
5. Meteors and observable small near-Earth objects (NEOs)
NASA JPL’s Small Body Database Query (SBDB) computes ephemerides of confirmed and unconfirmed small NEOs that are in orbit, including asteroids and comets. We are interested in small bodies that are observable optically on Earth, and to this end SBDB provides API access to data for observable small bodies, given the observer’s time and location.
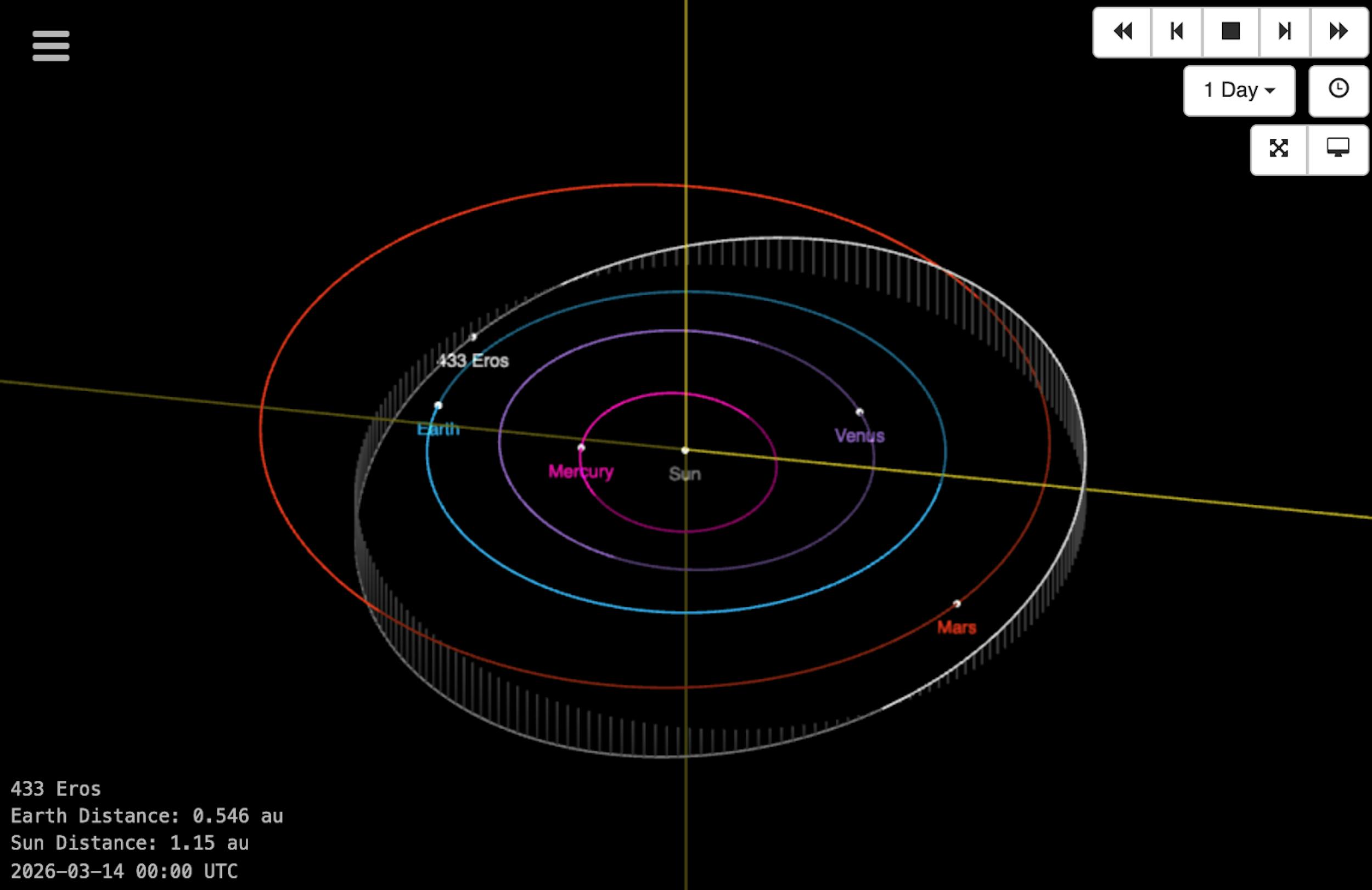
Orbit of the small body 433 Eros visualized with SBDB Lookup
6. Unmanned aerial vehicles (UAV)
UAVs airborne in open space are required to send Remote ID signals in the U.S. beginning September 16, 2023. Manufactured UAVs in the E.U. will be required to send Remote ID signals starting January 1, 2024. Japan’s mandatory requirements for UAV registration and Remote ID are already in effect since June 20, 2022. Remote ID signals are broadcasted over WiFi or Bluetooth and allow for determination of the drone’s altitude, location, speed, heading, and identity, exactly what we need to disambiguate drones from UAP. One uncertainty here is the range of Remote ID, which could range from several hundred feet to a few miles, depending on the Remote ID module, receiver performance, and environmental factors. We expect there will be published Remote ID datasets in the future as drone telemetry increases. We are also exploring passive radar systems that can help track other non-self-identifying airborne objects who intentionally or unintentionally are not compliant with regulations.
7. Stars and planets
Believe it or not, planets like Venus and Mars are often mistaken for UAP, especially when they are low in the sky and appear larger. Celestial information can be integrated from datasets like Stellarium.
How We Filter out Confounding Variables
We eliminate confounding variables at several stages in our system:
- Top of the funnel: before users submit, we will reduce the submission of known objects by providing a real-time, contextualized data layer of confounding variables within the camera as an AR lens. This helps users identify objects. More on this feature.
- Backend stage: Datasets that are not updated in real-time are less useful at the camera stage. For those variables, our backend system will attach any available relevant data to individual sightings once that data is received, enriching and contextualizing the sighting post-submission. This enables future queries of sightings to return contextual information, which could be used for analysis.
- Publish stage: Our scoring system is designed to surface the most anomalous and credible sighting events. Over time the score will incorporate more confounding variable data. For each variable, we define and compute an association rule which captures the probability of a reported object being associated with this variable. The scoring system downscores objects that have a higher probability of being a confounding variable. Although these lower score sightings are still published to the map, the score helps suppress background noise and boost up more anomalous objects - the signal.
What’s Next
If signal is truth, then noise is what distracts us from the truth. By building a more complete picture of what is in the observable sky, we can strip out what distracts us from potentially interesting truths. At Enigma Labs, we believe that through increasingly rigorous technical and data processes, the study of unidentified objects will become normalized science. We also believe in empowering our users with better tools and information to analyze UAP. We are excited to announce more of those tools in the coming weeks.
References
[1] Chatrchyan, S., Khachatryan, V., Sirunyan, A. M., Tumasyan, A., Adam, W., Aguilo, E., ... & Damiao, D. D. J. (2012). Observation of a new boson at a mass of 125 GeV with the CMS experiment at the LHC. Physics Letters B, 716(1), 30-61.
[2] Ahlers, M., Helbing, K., & Pérez de los Heros, C. (2018). Probing particle physics with IceCube. The European Physical Journal C, 78, 1-51.
[3] Aartsen, M. G., Ackermann, M., Adams, J., Aguilar, J. A., Ahlers, M., Ahrens, M., ... & Kowalski, M. (2015). Atmospheric and astrophysical neutrinos above 1 TeV interacting in IceCube. Physical Review D, 91(2), 022001.